AI for perception
| AI | Software | TRL Level: 6 | Linked WPs: 1, 3, 5, 6 | Linked PIARCHs: A3P |
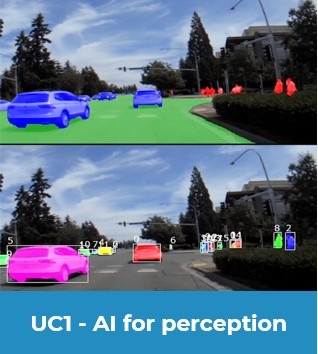
| 360°surround view object detection, multi-lane detection, robustness to obstructions | ||||
| Automotive, Robotics | Potential market entry: S2 2023 | Re-engineering effort: 12-36 MM | ||
| The autonomous driving industry has been very active in order to increase traffic safety, assistance and comfort for automotive and mobility systems. For these goals, two tasks are needed: obstacle detection to avoid accidents and lane positioning to navigate the road. Its main features : – 360° surround view detection for objects and multi-lane detections – Objects detection (e.g. pedestrian, car, truck, 2-wheelers) – Lanes detection (e.g; ego and adjacent lanes, line-marking) This use case provide a solution of object detection in conjunction with ego and adjacent lanes detection for autonomous driving. It provides accurate detection in diverse difficult situations such as heavy obstructions, erased lane markings, while considering constrained hardware cost and processing power. |
 |
|||
