Home
About
Components
Heterogeneous Computing – Kalray
Secure CPS-to-X Connectivity
BlueForce
GAPMOD 1.2
IP GNSS Product
Mobility Kits
NN TOOL
Greenwaves SDK 4.2
SmartDeepCam
Twin Builder
PIArchs
Heterogeneous Computing
Kalray
Greenwaves
Secure CPS-to-X Connectivity
Thales&Sequans
Perception for autonomous systems
Valeo
Ultra-precise localization system
Valeo
Cooperative Pre-Integrated Architecture
Industrial edge computing gateway
Eurotech
Use cases
AI for perception
Valeo
Robustness of CPS in Automated Driving level 4
Valeo & Ansys
Urban automated driving
Valeo & Sysnav
Automatic vacuum system
Leonardo & Eurotech & Uni Salerno
Trimming quality improvement
Leonardo & Eurotech & Uni Salerno
Aircraft Health Management System (AHMS)
Leonardo
Digital twin of metal forming production shop floor
Trumpf & ACS Plus
Mobile CPS – Cooperative lifting
Wika & Uni Augsburg & TU Clausthal & Emmtrix
Distributed controls for transmission grid
Rte & CentraleSupélec
Substation digitalization with virtual machines
Rte & Schneider Electric
Pedestrian detection for off-road construction machines
Scalable CPS-based flow chemistry modules
SpinSplit & BME
Monitoring network for environment quality and threat detection
Acoem
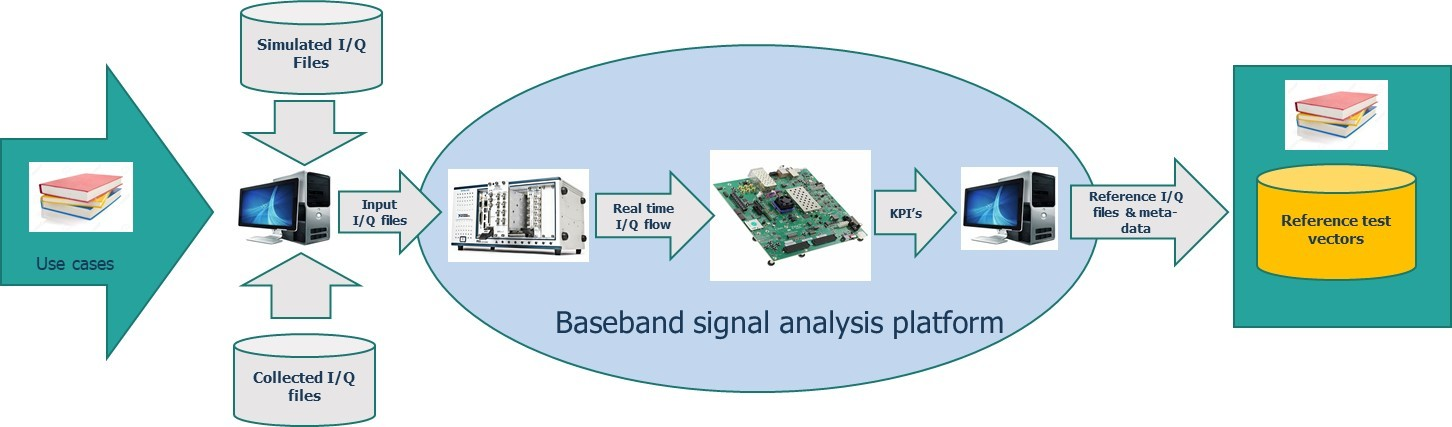
Validation of GNSS sensors for Automated Driving applications
M3 Systems
SaaS for handheld tools
Downloads
CPS4EU – objectives and project partners
Tools
Publications
Deliverables
Project results
Organization
Consortium
Management
Project Structure
Contact Us
Demos
News
Search
Menu
Menu
Validation of GNSS sensors for Automated Driving applications
Anis Ziadi, Segment Manager
Anis.ZIADI@m3systems.eu
https://m3systems.eu/en/home/
Process to analyze the recorded GNSS I/Q data
Scroll to top